机器人常用动作指令主要分为PTP*1和CP*2指令。像常用的Go、Jump等就属于PTP指令。Move属于CP指令。
PTP和CP动作指令的区别在于PTP运动时,机械手同时使用各关节电机,使机械手按最短的路径到达目标位,运动速度快,也正因为如此运动轨迹无法预测。而CP运动指令控制机械手按指定路径轨迹到达目标位,轨迹可控。速度相对慢。在指定动作指令速度和加/减速时,PTP动作指令使用SPEED指令和ACCEL指令,而CP动作指令使用SPEEDS和ACCELS指令。
1. GO指令用于以圆弧方式进行运动,将机器人机械臂的所有关节同时移动到目标位。

GO指令格式
2.JUMP指令用于通过门控运动(首先垂直上升,然后水平圆弧移动,最后垂直下降的门型动作)使机械臂从当前位置向指定位置进行 PTP 动作。机械手的手部先抬起至LimZ值,然后使手臂水平移动,快要到目标坐标上空的时候使其下降移动。此动作的标准是可以更准确地避开障碍物这一点。Jump不能用于6轴机械手,6轴机械手只能使用Jump3和Jump3 CP指令

JUMP动作方式
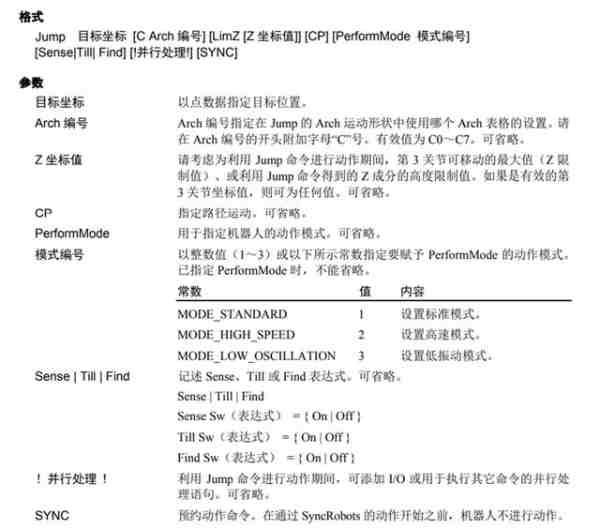
JUMP指令格式
3.MOVE指令:以直线轨迹将机械手从当前位置移动到指定目标位置。全关节同时启动,同时停止。需要注意的是即使目标坐标在机械手的动作范围内,一旦在Move或Arc运动轨迹超过允许动作范围外,机械手会突然停止,给伺服电机带来撞击,有产生故障的危险。为了防止这样的事发生,请在高速执行之前先以低速进行动作范围确认。
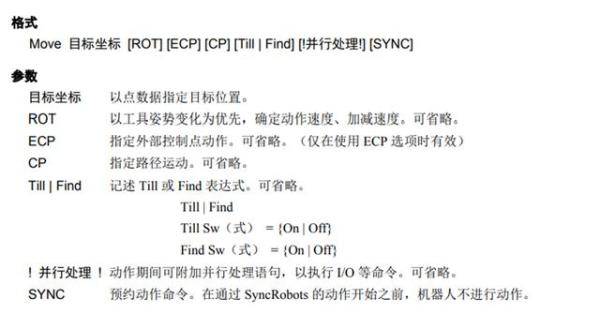
MOVE指令格式
差异点:Move 和 Go 都是使机器人机械臂动作的命令。两者之间的最大不同是 Go 是进行 PTP 动作,而 Move 是在直线轨道上移动机械臂。在重视到达目标点时的机械臂的姿势时,使用 Go命令;而更重视控制动作中的机械臂的轨迹时,使用 Move 命令。 Go 与 Jump 的差异 Jump 和 Go都是以 PTP 动作移动机器人机械臂的命令。但是,Jump 拥有一个 Go所没有的功能。Jump 首先将机器人的夹具末端抬起到 LimZ 值,然后水平移动机械臂,在达到目标坐标的上空时开始下降动作。这种移动的优点是可以切实地避开障碍物,更重要的是通过吸附和配置动作可以提高作业的循环时间。
*1,PTP:Pose To Pose
*2 , CP:Continuous Path