机器之心报道
编辑:小舟,小蛋
神经网络的深度并不意味着一切? 在最近的研究中,普林斯顿和英特尔的研究人员提出了使用并行子网或子结构的神经网络ParNet,在有效降低深度的同时保持高性能,实现了更快且更准确的速度。
深度是深神经网络的关键,但深度多意味着更多的序列计算和更多的延迟。 这就提出了——是否有可能建立高性能的“非深层”神经网络的问题。
最近,普林斯顿大学和英特尔实验室的研究证明了这一观点的可行性。 该研究使用并行子网,而不是分层。 这有助于有效减少深度,同时保持性能。
论文地址: https://arxiv.org/abs/2110.07641
首次表明,通过使用并行子结构,深度为12的网络在ImageNet中能够实现80%、CIFAR10中为96%、CIFAR100中为81%的top-1精度。 该研究表明,具有低深度骨干网络的模型在MS-COCO上可以达到48%的AP指标。 研究人员分析了该设计的扩展规则,给出了在不改变网络深度的情况下提高性能的方法。 最后,给出了关于如何用非深度网络建立低延迟识别系统的概念证明。
方法
该研究提出了一种虽然深度低,但可以在多个基准上实现高性能的网络架构ParNet。 ParNet由处理不同分辨率特性的并行子结构构成。 这些并行子结构称为流(stream ),来自不同流的特征在网络后期融合,融合后的特征用于下游任务。 图2a显示了ParNet的图像。
图2
ParNet Block
ParNet使用了VGG样式的block(Simonyanzisserman,2015 )。 为了探索非深层网络是否能够实现高性能,该研究通过实验发现,与ResNet样式的block相比,VGG样式的block更适合(如下表8所示)。 一般来说,训练VGG风格的网络比ResNet更难(例如He,2016a )。 但是,在最近的一些工作中,我们发现使用“结构重新参数化”方法(例如Ding,2021 )会使VGG样式的block更容易训练。
在训练期间,该研究在33卷积块中使用了多个分支。 训练完成后,多个分支可合并成一个33卷积块。 因此,最终得到只由33 block和非线性构成的简单网络。 block的这种重新参数化或融合(fusion )有助于减少推理期间的延迟。
下采样与block融合
除了具有相同输入和输出大小的repvgg-SSE块外,ParNet还包括“下采样”和融合块。 缩减像素采样block可以降低分辨率、增加宽度以实现多尺度处理,而block集成将合并来自多个分辨率的信息。 在缩减像素采样块中,没有“残差连接”; 相反,该研究增加了与卷积层并行的单层SE模块。
另外,在该研究中,在11卷的积分枝中追加了2D平均池化。 融合block类似于缩减像素采样block,但也包含其他“连接”(concatenation )层。 由于连接,融合block的输入通道数是下采样block的两倍。 为了减少参数量,该研究的下采样和融合块的设计如下图所示。
p3.toutiaoimg.com/origin/pgc-image/8a51002b19ca4bab9498a50f76bd2079.png?from=pc">网络架构
图 2a 展示了用于 ImageNet 数据集的 ParNet 模型示意图。初始层由一系列降采样块组成,降采样 block 2、3 和 4 的输出分别馈送到流 1、2 和 3。研究者发现 3 是给定参数预算的最佳流数(如表 10 所示)。每个流由一系列不同分辨率处理特征的 RepVGG-SSE block 组成。然后来自不同流的特征由融合 block 使用串联进行融合。最后,输出被传递到深度为 11 的降采样 block。与 RepVGG(Ding 等, 2021)类似,该研究对最后一个降采样层使用更大的宽度。
扩展 ParNet
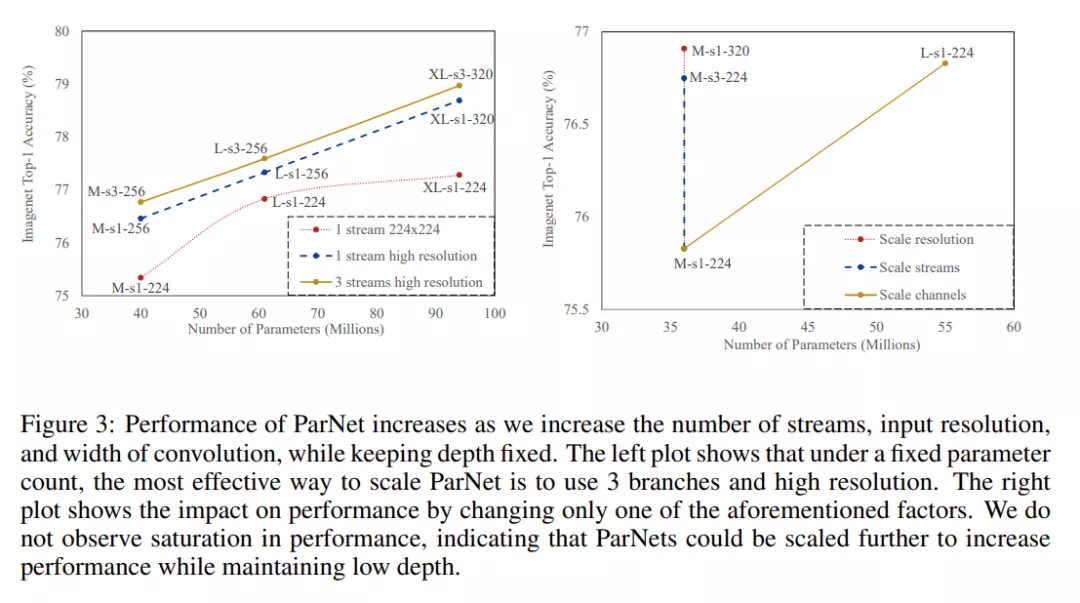
据观察,神经网络可以通过扩大网络规模来获得更高的准确度。之前的研究 (Tan & Le, 2019) 扩展了宽度、分辨率和深度。由于本研究的目标是评估是否可以在深度较低的情况下实现高性能,因此研究者将模型的深度保持不变,通过增加宽度、分辨率和流数来扩展 ParNet。
对于 CIFAR10 和 CIFAR100,该研究增加了网络的宽度,同时将分辨率保持为 32,流数保持为 3。对于 ImageNet,该研究在三个不同的维度上进行了实验,如下图 3 所示。
并行架构的实际优势
目前 5 纳米光刻工艺已接近 0.5 纳米晶硅尺寸,处理器频率进一步提升的空间有限。这意味着神经网络的更快推理必须依赖计算的并行化。单个单片 GPU 的性能增长也在放缓,预计传统光刻可实现的最大芯片尺寸将达到 800 平方毫米(Arunkumar 等,2017)。总体而言,未来在处理器频率、芯片尺寸以及每个处理器的晶体管数等方面都将维持一个平稳状态。
为了解决这个问题,最近的一些工作提出了多芯片模块 GPU (MCM-GPU),比最大的可实现单片 GPU 更快。用中型芯片取代大型芯片有望降低硅成本。这样的芯片设计有利于具有并行分支的分区算法,算法之间交换有限的数据并且尽可能地分别独立执行。基于这些因素,非深度并行结构将有利于实现快速推理,尤其是对于未来的硬件。
实验结果
表 1 展示了 ParNet 在 ImageNet 上的性能。该研究发现,深度仅为 12 的网络就可以实现惊人的高性能。为了与 ResNet 进行公平比较,研究者使用相同的训练协议和数据增强重新训练 ResNet,这将 ResNet 的性能提升到了超越官方结果的水平。值得注意的是,该研究发现 ParNet-S 在参数数量较少的情况下(19M vs 22M)在准确率上比 ResNet34 高出 1 个百分点以上。ParNet 还通过瓶颈设计实现了与 ResNet 相当的性能,同时深度减少到 1/4-1/8。
如下表 2 所示,ParNet 在准确率和速度上优于 ResNet,但参数和 flop 也更多。例如,ParNet-L 实现了比 ResNet34 和 ResNet50 更快的速度和更好的准确度。类似地,ParNet-XL 实现了比 ResNet50 更快的速度和更好的准确度,但具有更多的参数和 flop。这表明使用 ParNet 代替 ResNet 时存在速度与参数和 flop 之间的权衡。请注意,可以通过利用可以分布在 GPU 上的并行子结构来实现高速。
该研究测试了 ParNet 三种变体的速度:未融合、融合和多 GPU,结果如下表 3 所示。未融合的变体由 RepVGG-SSE 块中的 3×3 和 1×1 分支组成。在融合变体中,使用结构重参数化技巧将 3×3 和 1×1 分支合并为一个 3×3 分支。对于融合和未融合变体,该研究使用单个 GPU 进行推理,而对于多 GPU 变体,使用了 3 个 GPU。对于多 GPU 变体,每个流都在单独的 GPU 上启动。当一个流中的所有层都被处理时,来自两个相邻流的结果将在其中一个 GPU 上连接并进一步处理。为了跨 GPU 传输数据,该研究使用了 PyTorch 中的 NCCL 后端。
该研究发现尽管存在通信开销,但 ParNet 仍可以跨 GPU 有效并行化以进行快速推理。使用专门的硬件可以减少通信延迟,甚至可以实现更快的速度。
表 5 展示了提高 ParNet 性能的其他方法,例如使用更高分辨率的图像、更长的训练机制(200 个 epoch、余弦退火)和 10-crop 测试。这项研究有助于评估非深度模型在 ImageNet 等大规模数据集上可以实现的准确性。
MS-COCO (Lin 等,2014) 是一个目标检测数据集,其中包含具有常见对象的日常场景图像。研究者用 COCO-2017 数据集进行了评估。如下表 4 所示,即使在单个 GPU 上,ParNet 也实现了比基线更高的速度。这阐明了如何使用非深度网络来制作快速目标检测系统。
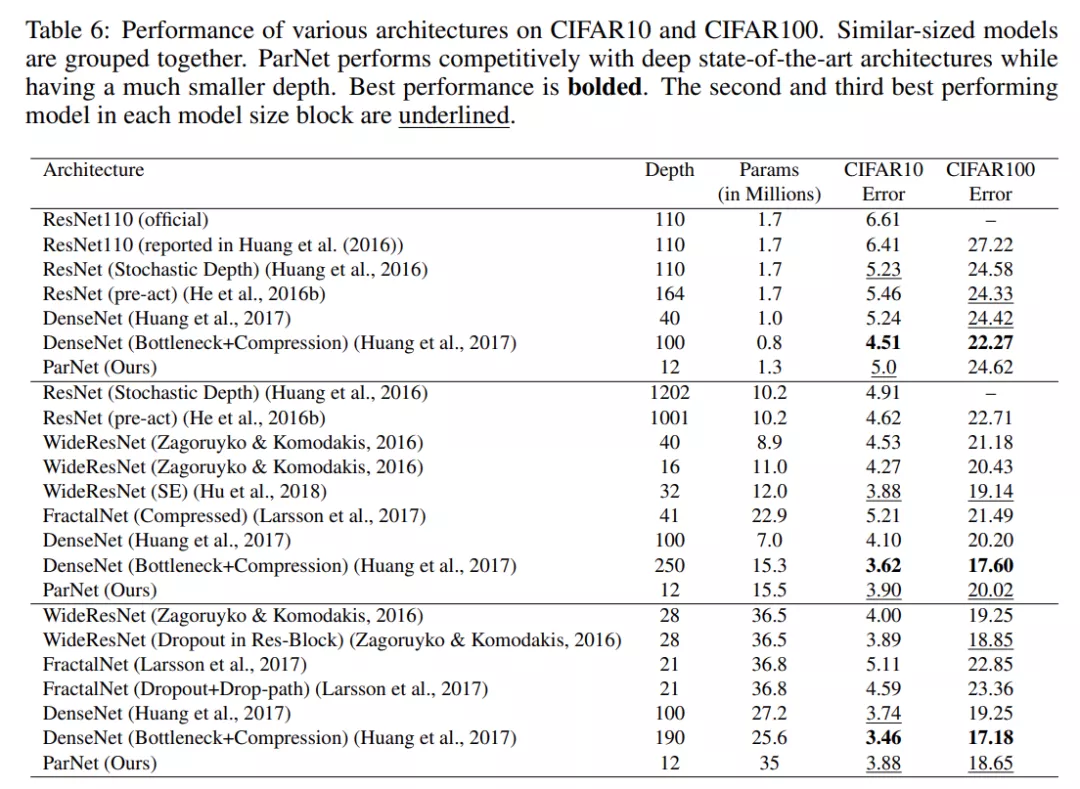
表 6 总结了各种网络在 CIFAR10 和 CIFAR100 上的性能。
消融实验
为了测试是否可以简单地减少 ResNet 的深度并使它们变宽,研究者测试了三个 ResNet 变体:ResNet12-Wide、ResNet14-Wide-BN 和 ResNet12-Wide-SSE。ResNet12-Wide 使用 ResNet 基础 block,深度为 12,而 ResNet14-Wide-BN 使用 ResNet 瓶颈 block,深度为 14。表 7 展示了对网络架构和训练协议的各种设计的消融研究结果,其中包括使用数据增强、SSE block 和 SiLU 激活函数的 3 种情况。
在表 10 中,研究者评估了参数总数相同但分支数不同( 1、2、3、4)的网络。实验表明,对于固定数量的参数,具有 3 个分支的网络具有最高的准确率,并且在网络分辨率分别为 224x224 和 320x320 这两种情况下都是最优的。

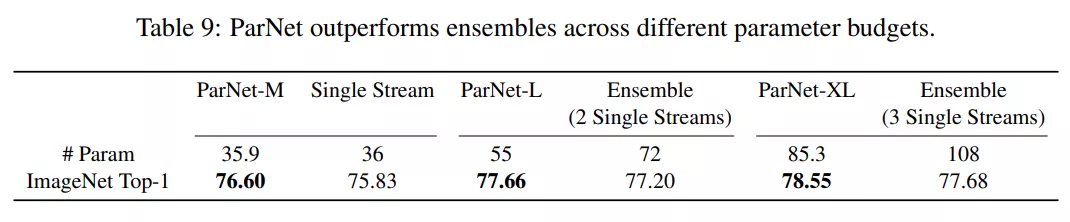
另一种网络并行化的方法是创建由多个网络组成的集合体。因此,该研究将 ParNet 和集成的网络进行对比。如下表 9 所示,当使用较少的参数时,ParNet 的性能优于集成的网络。