
1)点焊语句spotJ/spotL,其中spotL为直线形式走到焊接点并焊接,spotJ为moveJ形式走到焊接点并焊接
2)语句中的gun1为gundata,可以在程序数据,gundata里查看

Weld_counter:焊点计数
Max_nof_welds:最大焊点数
Curr_tip_wear:当前修磨量
Max_tip_wear:最大修磨量
Curr_wear_fix:当前静臂修磨量
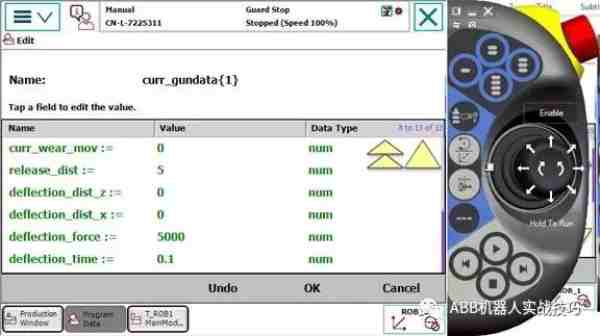
Curr_wear_mov:当前动臂修磨量
Release_dist:焊接前后的偏移距离(即走到焊接前,先会到偏移距离)
Deflection_dist_z:工具Z方向的挠性形变量(对应下面的挠性压力)
Deflection_dist_x:工具X方向的挠性形变量(对应下面的挠性压力)
Deflection_force:挠性形变时的压力
Deflection_time:挠性形变补偿时间
3)语句中的spot1为焊接数据,可以在程序数据,spot data里查看

其中prog_no为焊接规范(焊接程序号)
Tip_force为压力
Plate_thickness:板厚
Plate_tolerance:板厚检测时的允许误差